
1. La robotique médicale
Elle est apparue il y a environ 25 ans. Aujourd'hui, un robot médical est doté de très peu voire pas du tout d'autonomie. Certains s'adaptent peu à leur environnement et d'autres sont pilotés par des médecins ce qui explique cette absence d'autonomie. De plus les équipements actuels sont très coûteux, ce qui empêche une utilisation optimale de la robotique médicale. Elle existe dans plusieurs domaines et principalement dans la chirurgie générale.
On peut la classer de plusieurs manières.
Tout d'abord en fonction de son degré d'autonomie:
- les systèmes passifs qui n'ont ni moteur, ni autonomie
- les systèmes semi-actifs qui sont généralement des positionneurs et des guides d'outil
- les systèmes actifs qui interviennent durant une partie de l'opération de façon autonome (les axes sont généralement motorisés).
Ainsi faisons-nous la différence entre les sytèmes synergiques (sytèmes mus par l'action du chirurgien mais qui limitent ses gestes par construction mécanique ou logicielle) et les systèmes de téléchirugie et de microsystèmes robotisés (systèmes actifs automatiques et redondants, un peu plus autonomes).
On les classe également en fonction de leur domaine d'action et de l'échelle à laquelle ces robots travaillent:
- la macro-robotique (robots de réhabilitation, d'intervention chirurgicale, de stimulation fonctionnelle)
- la micro-robotique (endoscopes et robots pour la chirurgie minimallement invasive)
- la bio-robotique (implants électroniques, bioniques, robionique).
On peut la classer de plusieurs manières.
Tout d'abord en fonction de son degré d'autonomie:
- les systèmes passifs qui n'ont ni moteur, ni autonomie
- les systèmes semi-actifs qui sont généralement des positionneurs et des guides d'outil
- les systèmes actifs qui interviennent durant une partie de l'opération de façon autonome (les axes sont généralement motorisés).
Ainsi faisons-nous la différence entre les sytèmes synergiques (sytèmes mus par l'action du chirurgien mais qui limitent ses gestes par construction mécanique ou logicielle) et les systèmes de téléchirugie et de microsystèmes robotisés (systèmes actifs automatiques et redondants, un peu plus autonomes).
On les classe également en fonction de leur domaine d'action et de l'échelle à laquelle ces robots travaillent:
- la macro-robotique (robots de réhabilitation, d'intervention chirurgicale, de stimulation fonctionnelle)
- la micro-robotique (endoscopes et robots pour la chirurgie minimallement invasive)
- la bio-robotique (implants électroniques, bioniques, robionique).
En chirurgie
Prenons pour exemple, le robot Da Vinci, une machine dirigée par un chirurgien pour réaliser des opérations, principalement au niveau de l'abdomen. Elle appartient donc au domaine de la macro-robotique, est un système semi-actif et donc synergique. Le robot est composé de deux parties: celle au dessus du patient dotée de quatre bras articulés et celle à part qui concerne le chirugien directement. Cette dernière retransmet en direct la vue de la caméra endoscopique située sur la première partie. Les deux parties sont bien évidemment reliées par des cables pour faire passer la vision dans un sens et le contrôle des bras dans l'autre.
La machine est dotée de paramètres de sécurité avec notamment une protection au niveau des bras qui empêche d'abimer les tissus du patient, ou une batterie de secours qui lui donne une autonomie de 20 minutes en cas de coupure de courant. Il est utilisé dans de nombreux CHU (Centre Hospitalier Universitaire) français comme à Tours, Brest ou Rennes, également en Suisse (CHU de Genève), au Canada (L'Hôpital du Sacré-Cœur de Montréal) et aux États-Unis.
Fin 2000, des expérimentations sont organisées partout dans le monde. En 2001, les premières opérations sont réalisées à l'aide du Da Vinci.
Prenons pour exemple, le robot Da Vinci, une machine dirigée par un chirurgien pour réaliser des opérations, principalement au niveau de l'abdomen. Elle appartient donc au domaine de la macro-robotique, est un système semi-actif et donc synergique. Le robot est composé de deux parties: celle au dessus du patient dotée de quatre bras articulés et celle à part qui concerne le chirugien directement. Cette dernière retransmet en direct la vue de la caméra endoscopique située sur la première partie. Les deux parties sont bien évidemment reliées par des cables pour faire passer la vision dans un sens et le contrôle des bras dans l'autre.
La machine est dotée de paramètres de sécurité avec notamment une protection au niveau des bras qui empêche d'abimer les tissus du patient, ou une batterie de secours qui lui donne une autonomie de 20 minutes en cas de coupure de courant. Il est utilisé dans de nombreux CHU (Centre Hospitalier Universitaire) français comme à Tours, Brest ou Rennes, également en Suisse (CHU de Genève), au Canada (L'Hôpital du Sacré-Cœur de Montréal) et aux États-Unis.
Fin 2000, des expérimentations sont organisées partout dans le monde. En 2001, les premières opérations sont réalisées à l'aide du Da Vinci.

Le robot Da Vinci
L'utilisation du Da Vinci apporte quelques avantages :
- ses bras articulés possèdent sept degrés de liberté, à l'inverse de notre poignet qui n'en possède que trois, ce qui permet une plus grande précision, car les petits mouvements (tremblements) du chirurgien n'ont pas d'effet sur eux.
- lors d'une opération, le patricien profite d'un meilleur confort que lors d'une opération classique, il se fatigue donc moins et évite également certains troubles musculo- squelettiques, de type tendinite pour le chirurgien.
- une opération réalisée à l'aide du Da Vinci est moins invasive, c'est-à-dire que les risques d'erreur sont moins grands (que si elle est pratiquée directement par le chirurgien et que les gestes affectent moins le corps). Il y a donc moins de risques de complications postopératoires et les temps d'hospitalisation sont plus courts.
Mais ce robot comporte également des contraintes :
- il coûte très cher : plus d'un million d'euros ce qui entraîne une augmentation du coût des interventions : 2 000 € de plus au CHU de Nantes, 25 à 30 % de plus aux hôpitaux universitaires de Genève.
- ces interventions durent d'autant plus longtemps soit environ 2 fois plus selon Intuitive Surgical - le frabicant du robot
- surtout quand le chirurgien n'est pas habitué au Da Vinci.
- il ne procure pas de sensation tactile au chirurgien lorsque les pinces touchent un organe, mais cette amélioration est prévue pour la prochaine version à venir par le fabricant. - la société Intuitive Surgical qui fabrique le Da Vinci détient le monopole.
Bien sûr, les différents points que nous venous de soulever sont indissociables: par exemple, l'ablation de la thyroïde réalisée avec un Da Vinci est plus longue, mais évite des effets secondaires, tels qu'une altération de la voix, une baisse du taux de calcium dans le sang après l’opération, une cicatrice importante sur le cou. Il existe aussi certaines contre- indications à l'utilisation d'un Da Vinci pour l'opération, telle que l'obésité. En 2009, 60 % des opérations de la prostate aux États-Unis ont eu recours à un Da Vinci.
Ce robot est donc connu et utilisé dans les pays développés. Il sert d'exemple concret pour illustrer la situation actuelle de la robotique médicale. Mais il existe également d'autres dispositifs qui travaillent au niveau macroscopique et microscopique. Le Cyberknife détruit des tumeurs de manière non-invasive. Il repère l’emplacement de la tumeur et la cible en continu pendant l’intervention.
Le dispositif ROSA est dédié aux procédures crâniennes mini-invasives. Le Sensei est utilisé pour traiter les troubles du rythme cardiaque. L'EndoAssist est un appareil qui maintient la caméra lors d'une endoscopie.
- ses bras articulés possèdent sept degrés de liberté, à l'inverse de notre poignet qui n'en possède que trois, ce qui permet une plus grande précision, car les petits mouvements (tremblements) du chirurgien n'ont pas d'effet sur eux.
- lors d'une opération, le patricien profite d'un meilleur confort que lors d'une opération classique, il se fatigue donc moins et évite également certains troubles musculo- squelettiques, de type tendinite pour le chirurgien.
- une opération réalisée à l'aide du Da Vinci est moins invasive, c'est-à-dire que les risques d'erreur sont moins grands (que si elle est pratiquée directement par le chirurgien et que les gestes affectent moins le corps). Il y a donc moins de risques de complications postopératoires et les temps d'hospitalisation sont plus courts.
Mais ce robot comporte également des contraintes :
- il coûte très cher : plus d'un million d'euros ce qui entraîne une augmentation du coût des interventions : 2 000 € de plus au CHU de Nantes, 25 à 30 % de plus aux hôpitaux universitaires de Genève.
- ces interventions durent d'autant plus longtemps soit environ 2 fois plus selon Intuitive Surgical - le frabicant du robot
- surtout quand le chirurgien n'est pas habitué au Da Vinci.
- il ne procure pas de sensation tactile au chirurgien lorsque les pinces touchent un organe, mais cette amélioration est prévue pour la prochaine version à venir par le fabricant. - la société Intuitive Surgical qui fabrique le Da Vinci détient le monopole.
Bien sûr, les différents points que nous venous de soulever sont indissociables: par exemple, l'ablation de la thyroïde réalisée avec un Da Vinci est plus longue, mais évite des effets secondaires, tels qu'une altération de la voix, une baisse du taux de calcium dans le sang après l’opération, une cicatrice importante sur le cou. Il existe aussi certaines contre- indications à l'utilisation d'un Da Vinci pour l'opération, telle que l'obésité. En 2009, 60 % des opérations de la prostate aux États-Unis ont eu recours à un Da Vinci.
Ce robot est donc connu et utilisé dans les pays développés. Il sert d'exemple concret pour illustrer la situation actuelle de la robotique médicale. Mais il existe également d'autres dispositifs qui travaillent au niveau macroscopique et microscopique. Le Cyberknife détruit des tumeurs de manière non-invasive. Il repère l’emplacement de la tumeur et la cible en continu pendant l’intervention.
Le dispositif ROSA est dédié aux procédures crâniennes mini-invasives. Le Sensei est utilisé pour traiter les troubles du rythme cardiaque. L'EndoAssist est un appareil qui maintient la caméra lors d'une endoscopie.
En substitut
Interessons-nous maintenant à la bio-robotique. Elle permet à un patient de retrouver l'usage d'un membre. Il s'agit d'associer l'électronique et la robotique au système nerveux humain (cf: Comprendre: les messages nerveux).
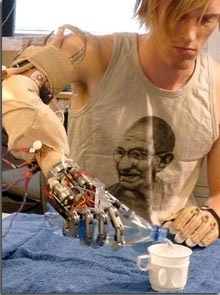
Les Italiens comptent parmi les leaders mondiaux en la matière. En novembre 2008, la première main artificielle contrôlée par les nerfs du receveur a été réalisée par la Scuola Superiore Sant’Anna de Pise et l’Université Campus Biomedico de Rome (UCBM). Grâce à cet implant, le patient, un jeune homme de 27 ans, parvient à contrôler avec un taux de réussite de 85 % trois types différents de prise.
La prothèse de main robotique présentée par la même Scuola Superiore Sant’Anna est plus révolutionnaire encore. Dans le cadre du projet SmartHand, financé par l’Union européenne et qui regroupe cinq autres pays, une nouvelle main robotique aux fonctionnalités incomparables a été présentée. Dotée de quatre moteurs et d’une quarantaine de microcapteurs, cette main permet en effet aux patients amputés chez lesquels elle a été testée d’écrire, de mélanger et même de verser de l’eau. Le fonctionnement de la main repose sur son implantation sur le moignon du patient, tandis que des électrodes sont reliées à ses muscles résiduels. C’est grâce à ces derniers que circulent les signaux électriques interprétés par le dispositif pour déclencher des mouvements (cf Comprendre - Les messages nerveux). Cinq ans de travaux réalisés par les chercheurs de Pise ont même contribué à mettre au point des doigts artificiels capables de reconnaître différents types de tissus.
Alors que le projet est pratiquement finalisé, sa commercialisation devrait débuter dans les deux années à venir avec à la clé un autre pari fou : celui de vendre cette main artificielle pour moins de 100 dollars, alors que les prothèses actuelles ne sont aujourd’hui pas disponibles à moins de 20 000 dollars.
Ainsi, la robotique médicale répond aux différents problèmes de la médecine notamment dans la chirurgie en apportant les avantages suivants: une meilleure précision, une sécurité accrue, une diminution du nombre d'interventions et un temps d'hospitalisation réduit.
C'est un système complet puisqu'il s'agit d'une structure mécanique qui interagit avec un homme et est composé de composants électroniques et d'un contrôleur de logiciel. Elle peut même interagir avec le sytème nerveux humain. Mais il doit être sécurisé à tous les niveaux. En effet, la robotique médicale fait face à certaines problématiques: l'interaction intime avec un environnement humain est risqué puisque le comportement du patient ou du patricien est imprévisible et qu'il y a risque de collision; l'espace important qu'occupe la machine demeure également une limite.
Enfin, on ne peut automatiser le geste en médecine car il y a un facteur humain: les conditions changent en fonction du patient et du personnel médical, et il y a une contrainte clinique: chaque opération, même spécialisée, est différente. Mais finalement, la robotique médicale ne peut pas être considérée comme dangereuse pour notre avenir, au contraire, elle s'annonce prometteuse à partir du moment où les consignes de sécurité sont respectées.
Interessons-nous maintenant à la bio-robotique. Elle permet à un patient de retrouver l'usage d'un membre. Il s'agit d'associer l'électronique et la robotique au système nerveux humain (cf: Comprendre: les messages nerveux).
Les Italiens comptent parmi les leaders mondiaux en la matière. En novembre 2008, la première main artificielle contrôlée par les nerfs du receveur a été réalisée par la Scuola Superiore Sant’Anna de Pise et l’Université Campus Biomedico de Rome (UCBM). Grâce à cet implant, le patient, un jeune homme de 27 ans, parvient à contrôler avec un taux de réussite de 85 % trois types différents de prise.
La prothèse de main robotique présentée par la même Scuola Superiore Sant’Anna est plus révolutionnaire encore. Dans le cadre du projet SmartHand, financé par l’Union européenne et qui regroupe cinq autres pays, une nouvelle main robotique aux fonctionnalités incomparables a été présentée. Dotée de quatre moteurs et d’une quarantaine de microcapteurs, cette main permet en effet aux patients amputés chez lesquels elle a été testée d’écrire, de mélanger et même de verser de l’eau. Le fonctionnement de la main repose sur son implantation sur le moignon du patient, tandis que des électrodes sont reliées à ses muscles résiduels. C’est grâce à ces derniers que circulent les signaux électriques interprétés par le dispositif pour déclencher des mouvements (cf Comprendre - Les messages nerveux). Cinq ans de travaux réalisés par les chercheurs de Pise ont même contribué à mettre au point des doigts artificiels capables de reconnaître différents types de tissus.
Alors que le projet est pratiquement finalisé, sa commercialisation devrait débuter dans les deux années à venir avec à la clé un autre pari fou : celui de vendre cette main artificielle pour moins de 100 dollars, alors que les prothèses actuelles ne sont aujourd’hui pas disponibles à moins de 20 000 dollars.
Ainsi, la robotique médicale répond aux différents problèmes de la médecine notamment dans la chirurgie en apportant les avantages suivants: une meilleure précision, une sécurité accrue, une diminution du nombre d'interventions et un temps d'hospitalisation réduit.
C'est un système complet puisqu'il s'agit d'une structure mécanique qui interagit avec un homme et est composé de composants électroniques et d'un contrôleur de logiciel. Elle peut même interagir avec le sytème nerveux humain. Mais il doit être sécurisé à tous les niveaux. En effet, la robotique médicale fait face à certaines problématiques: l'interaction intime avec un environnement humain est risqué puisque le comportement du patient ou du patricien est imprévisible et qu'il y a risque de collision; l'espace important qu'occupe la machine demeure également une limite.
Enfin, on ne peut automatiser le geste en médecine car il y a un facteur humain: les conditions changent en fonction du patient et du personnel médical, et il y a une contrainte clinique: chaque opération, même spécialisée, est différente. Mais finalement, la robotique médicale ne peut pas être considérée comme dangereuse pour notre avenir, au contraire, elle s'annonce prometteuse à partir du moment où les consignes de sécurité sont respectées.
