
2. La robotique dans l'industrie logistique
Le domaine de la logistique connait une forte augmentation du nombre de robots. Ces derniers deviennent de plus en plus polyvalents au cours des années et ont pour objectif principal la réduction de la charge de travail du travailleur tout en gardant une qualité et une productivité importante.
Ils accomplissent des tâches diverses parmi lesquelles on peut distinguer :
• les tâches de palettisation, c’est à dire, le rangement des marchandises;
• le déplacement des marchandises au sein même d’un entrepôt, remplaçant ainsi les labyrinthes de bandes transporteuses (tapis roulants).
Les robots SCARA de l’entreprise allemande KUKA, par exemple, sont capables de palettiser, dépalettiser, trier des cartons ou réservoirs en plastiques.
Exemples d’applications possibles avec ce genre de robot :
Application 1: La boucle logistique (Logistic Loop)
Dans cet exemple d’application trois produits différents sont posés sous forme de couches triées par catégorie sur trois palettes mixtes.
Ils accomplissent des tâches diverses parmi lesquelles on peut distinguer :
• les tâches de palettisation, c’est à dire, le rangement des marchandises;
• le déplacement des marchandises au sein même d’un entrepôt, remplaçant ainsi les labyrinthes de bandes transporteuses (tapis roulants).
Les robots SCARA de l’entreprise allemande KUKA, par exemple, sont capables de palettiser, dépalettiser, trier des cartons ou réservoirs en plastiques.
Exemples d’applications possibles avec ce genre de robot :
Application 1: La boucle logistique (Logistic Loop)
Dans cet exemple d’application trois produits différents sont posés sous forme de couches triées par catégorie sur trois palettes mixtes.
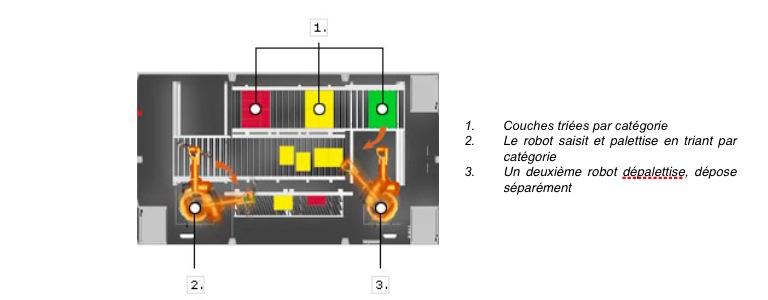
Un premier robot de palettisation enlève une couche complète à l’aide d’un préhenseur à ventouse puis dépose les produits séparément sur un convoyeur (tapis roulant). Le deuxième robot de palettisation saisit les produits individuellement pour les déposer à nouveau triés par catégorie sur des palettes.
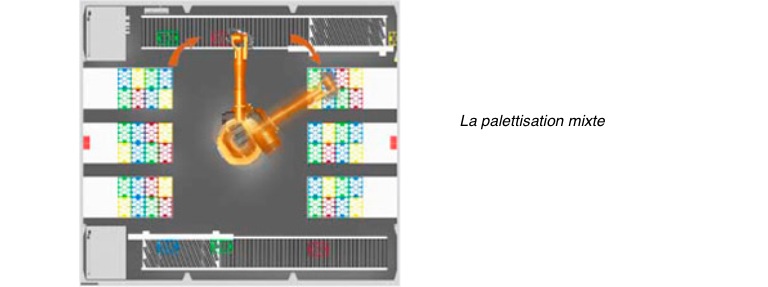
Application 2 : La palettisation mixte (Mixed Palletizing)
Dans ce modèle les robots trouvent trois palettes, chacune avec des produits différents et ayant des dimensions différentes les unes des autres. Un premier robot de palettisation dépose ces articles séparément sur un convoyeur. A la fin du convoyeur, le robot saisit à nouveau les articles et les palettise avec diverses constellations mixtes sur trois palettes de l'autre côté.
Application 2 : La palettisation mixte (Mixed Palletizing)
Dans ce modèle les robots trouvent trois palettes, chacune avec des produits différents et ayant des dimensions différentes les unes des autres. Un premier robot de palettisation dépose ces articles séparément sur un convoyeur. A la fin du convoyeur, le robot saisit à nouveau les articles et les palettise avec diverses constellations mixtes sur trois palettes de l'autre côté.
Le Logiciel Système KUKA est le système d’exploitation et donc le noyau de toute la commande. Ce dernier rassemble toutes les fonctions de base nécessaires à l’exploitation du système du robot, comme la planification de sa trajectoire.
La structure du Logiciel Système KUKA est conviviale et basée sur Windows, ce qui rend sa manipulation facile. De plus, l’éventail de ses fonctions peut être élargi à tout moment grâce à des interfaces compatibles.
La structure du Logiciel Système KUKA est conviviale et basée sur Windows, ce qui rend sa manipulation facile. De plus, l’éventail de ses fonctions peut être élargi à tout moment grâce à des interfaces compatibles.

D’autres robots tels que le Kiva Bot de l’entreprise américaine KIVA Systems, assurent le déplacement des articles au sein des entrepôts.
Ces robots sont connectés à un même réseau et sont capables de se déplacer seuls, saisir des articles et de les apporter à des opérateurs humains ou à d’autres robots qui procèdent ensuite à l’emballage et à l’expédition des articles.
Le déplacement des robots est assuré par une grille dotée de codes barres , qui forment une carte sur toute la surface de l’entrepôt. Les robots suivent cette grille et à l’intersection des lignes se trouvent des codes barres, qui permettent à la fois aux robots de se repérer et de ne pas entrer en collision avec d’autres robots et aux humains de gérer leur position au sein de l’entrepôt.
Leur utilisation assure ainsi une précision accrue lors de la sélection des articles: étant donné que la position de ces derniers est définie et programmée au préalable dans le réseau, les robots replacent les inventaires toujours aux mêmes endroits de l’entrepôt, aux mêmes points de coordonnées sur la grille.
Elle assure également une productivité plus élevée, en limitant l’utilisation des chariots élévateurs qui prennent plus de place, se déplacent plus lentement et dépendent non pas d’une simple programmation mais de l’assistance d’un humain qui est plus susceptible de mal placer les inventaires.
Ces robots sont connectés à un même réseau et sont capables de se déplacer seuls, saisir des articles et de les apporter à des opérateurs humains ou à d’autres robots qui procèdent ensuite à l’emballage et à l’expédition des articles.
Le déplacement des robots est assuré par une grille dotée de codes barres , qui forment une carte sur toute la surface de l’entrepôt. Les robots suivent cette grille et à l’intersection des lignes se trouvent des codes barres, qui permettent à la fois aux robots de se repérer et de ne pas entrer en collision avec d’autres robots et aux humains de gérer leur position au sein de l’entrepôt.
Leur utilisation assure ainsi une précision accrue lors de la sélection des articles: étant donné que la position de ces derniers est définie et programmée au préalable dans le réseau, les robots replacent les inventaires toujours aux mêmes endroits de l’entrepôt, aux mêmes points de coordonnées sur la grille.
Elle assure également une productivité plus élevée, en limitant l’utilisation des chariots élévateurs qui prennent plus de place, se déplacent plus lentement et dépendent non pas d’une simple programmation mais de l’assistance d’un humain qui est plus susceptible de mal placer les inventaires.
